Ten wpis powstał na podstawie szkoleń z astronawigacji na pokładzie Nel Blu. Poruszane problemy są bardzo podstawowe, a występują one jeszcze PRZED rozpoczęciem właściwej pracy z sekstantem and co.
Podstawowy sposób wyznaczania pozycji astronawigacyjnej to (posługując się terminologią nawigacji terestrycznej) pozycja z dwóch niejednoczesnych pomiarów. Co do niej jest potrzebne?
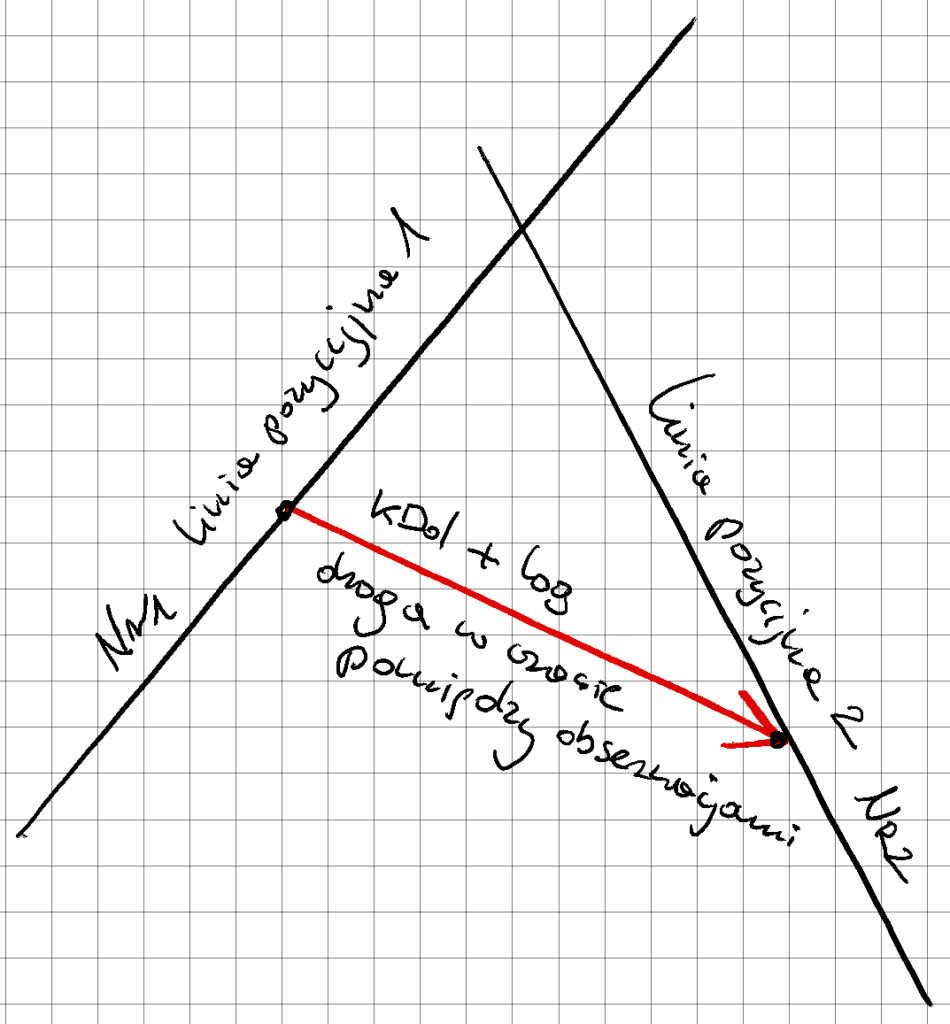
- Pierwszy namiar (Nr1)
- Drugi namiar (Nr2)
- Wektor odpowiadający drodze jachtu pomiędzy pierwszym i drugim namiarem (KDd + log)
I tu trzeba przyjąć pewne założenia.
Jeżeli mamy zamiar używać astronawigacji nie tylko po to by uzyskać Yachtmaster Ocean, hobbystycznie, ale do realnej nawigacji to musimy założyć, że nie mamy GPS i wynikających z tego benefitów, W obecnej praktyce te benefity są tak oczywiste, że przestaliśmy na nie zwracać uwagę. Oto kilka z nich:
- Na co dzień posługujemy się COG (course over ground) i SOG (speed over ground). To są te dane które w pierwszej kolejności dostarcza nam GPS. Jesteśmy w stanie bezpośrednio zobrazować je na mapie, czy to elektronicznej czy papierowej. I to są te dane, z których korzystamy w celu wykreślenia pozycji.
- W tradycyjny sposób, powyższe dane są dopiero na końcu długiej ścieżki zbierania danych, z których każda ma różną dokładność. Po kolei…
Musimy mieć więc precyzyjne dane dotyczące prędkości jachtu po wodzie, dewiację, dryf i znos. Ponieważ rzadko kto obecnie na co dzień prowadzi nawigację zliczeniową, korzystając z chartploterów i GPSa, to konieczność nieustannej kalibracji tych danych zanika. Błąd w szacowanej dewiacji nie jest istotny, jeżeli nieustająco poruszamy się COG, podobnie z innymi wartościami. Niestety, aby „astronawigacja” mogła być wykorzystywana do prawdziwego, niezależnego od satelity określenia pozycji to musimy kontrolować wszystkie konieczne dane do jej uzyskania i ich błędy.
Prędkość po wodzie: STW
Prędkość po wodzie: log musi być kalibrowany, tzn musimy go dokładnie ustawić tak, by odpowiadał rzeczywistości. Czynność niby jest prosta i oczywista, (dla kogoś kto posiada instrukcję obsługi) ale w praktyce sprawia to sporo kłopotów:
- Ja pływam po akwenach pływowych, i znaleźć miejsce i moment, gdzie da się wyeliminować wpływ prądu jest trudne. Trzeba zacząć stosować bardziej wyrafinowane techniki pływania pod prąd i z prądem na tym samym odcinku, by uśrednić wartość. Im bardziej skomplikowane to musi być tym większa niepewność czy kalibracja jest ok. Szczególnie, że na wodach pływowych nieustająco, niejako z założenia nie zgadzają nam się SOG i STW więc bieżące korekty są niewskazane. I raczej trudno jest zauważyć błędy nie przekraczające 1w.
- Tradycyjny log z wiatraczkiem (puddle wheel) ma tendencję do zarastania, trzeba go często czyścić, czasami trzeba też czyścić obszar naokoło niego, mi się ostatnio doczepiły pąkle (barnacles) zaraz obok niego co musiało mieć wpływ na jego wskazania. Jeżeli się często wyjmuje log i go czyści, to łatwo jest go włożyć w nieprawidłowy sposób, tu wystarczy milimetr za płytko i wskazania są nieprawidłowe. Oczywiście są nowsze technologie (np log elektromagnetyczny), ale one mimo, że dużo sprawniejsze też wymagają nadzoru (anoda, prąd, zarastanie itd).
Prąd pływowy (tidal stream)
Kierunek i siła prądu (pływowego). Zasięg prądów pływowych od wybrzeża nie jest bardzo duży (kilkadziesiąt mil) więc jego wpływ na astronawigację jest rzadki. Niemniej jednak trzeba o nim pamiętać, szczególnie jak już zbliżamy się do lądu. Oszacowanie jego wpływu na przebytą drogę jest w takiej sytuacji bardzo na oko, jednak możliwe do policzenia. Trzeba tylko mieć aktualne pomoce nawigacyjne.
Ale jest jeszcze jeden problem, który w wielkim skrócie zilustruję obrazkiem.

Duże romby pokazują ogólnie dostępne dane uzyskiwalne w Atlasach Prądów. Jak widać, nie pokazują one skomplikowanej struktury zachowania wody: zarówno prędkość jak i kierunek wody pomiędzy punktami pomiaru różnią się znacznie. Na całe szzcęście im dalej w ocean, tym mniejsze są lokalne zawirowania.
Prądy Oceaniczne
Niestety z prądami oceanicznymi jest gorzej. Ich zgodność lokalna z atlasami prądów morskich jest mała. O ile przy dłuższym przelocie często te wartości się uśredniają, to my potrzebujemy konkretnych i jak najbardziej precyzyjnych danych w ciągu tych 4-6 godzin pomiędzy kolejnymi obserwacjami.
Poniżej są dwie mapki pokazujące prądy w okolicach Portugalii (prądy morskie, nie pływowe)
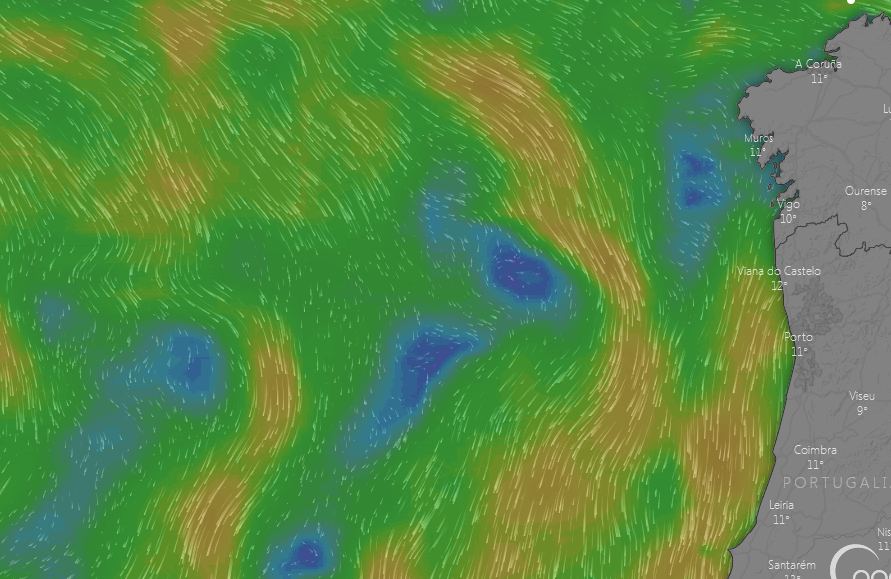
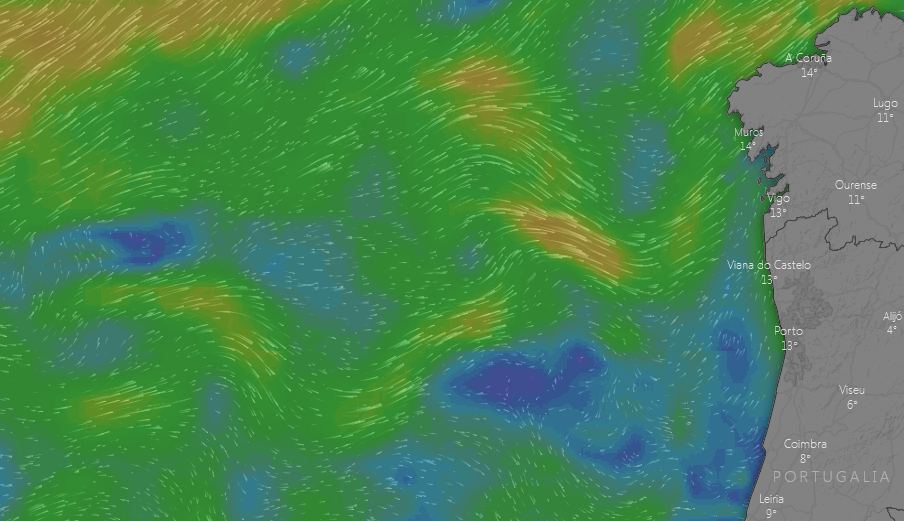
Tak wyglądają prądy dzień po dniu. Czemu takie różnice? Czemu taka niejednorodność ruchu wody, gdzie są różnice dochodzące do 1w?
Trudno mi jest powiedzieć, w każdym razie, mapy uzyskiwane przez internet z Windy nie pokrywają się z prądami z map oceanicznych i nie pokrywają się z rzeczywistością. Ostatnio płynąc wzdłuż Portugalii, na podstawie prędkości po wodzie, danych z GPS itd oszacowałem prąd na 1,2-1,5w na północ.